|
|
| MODM_FLAGS8 (Enable) |
| |
|
| Tcs3472 (Data &data, uint8_t address=addr ()) |
| |
|
bool | initialize (Enable_t flags=Enable_PollingMode) |
| | Power up sensor and start conversions.
|
| |
|
bool | configure (Gain gain=Gain::X1, IntegrationTime int_time=IntegrationTime::MSEC_2_4) |
| |
|
bool | setGain (Gain gain=Gain::X1) |
| | The gain can be used to adjust the sensitivity of all ADC output channels.
|
| |
|
bool | setIntegrationTime (IntegrationTime int_time=tcs3472::IntegrationTime::MSEC_2_4) |
| | Sets the integration time for the ADCs.
|
| |
|
bool | setWaitTime (WaitTime wait_time, bool wait_long=false) |
| | Sets the wait time for the ADCs.
|
| |
|
bool | setInterruptLowThreshold (uint16_t threshold) |
| | Sets the low threshold for the interrupt-comparator.
|
| |
|
bool | setInterruptHighThreshold (uint16_t threshold) |
| | Sets the high threshold for the interrupt-comparator.
|
| |
|
bool | setInterruptPersistenceFilter (InterruptPersistence value) |
| | The gain can be used to adjust the sensitivity of all ADC output channels.
|
| |
|
bool | reloadInterrupt () |
| | Resets the interrupt output.
|
| |
|
bool | readColor () |
| | Read current samples of ADC conversions for all channels.
|
| |
|
bool | readRegisters (RegisterAddress address, uint8_t *values, uint8_t count=1) |
| |
|
bool | writeRegister (RegisterAddress address, uint8_t value) |
| |
|
Data & | getData () |
| |
| void | attachConfigurationHandler (I2c::ConfigurationHandler handler) |
| |
| bool | ping () |
| |
|
bool | read (uint8_t *buffer, std::size_t size) |
| | Starts a write transaction and waits until finished.
|
| |
| void | setAddress (uint8_t address) |
| |
|
bool | write (const uint8_t *buffer, std::size_t size) |
| | Starts a write transaction and waits until finished.
|
| |
|
bool | writeRead (const uint8_t *writeBuffer, std::size_t writeSize, uint8_t *readBuffer, std::size_t readSize) |
| | Starts a write-read transaction and waits until finished.
|
| |
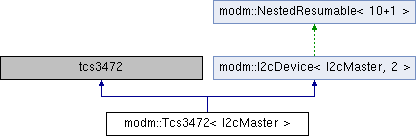
template<typename I2cMaster>
class modm::Tcs3472< I2cMaster >
TCS3472X Digital Color Sensors
- See also
- tcs3472
- Author
- David Hebbeker, Arjun Sarin, Thomas Sommer, Niklas Hauser
 1.4.2
1.4.2 
