|
modm API documentation
|
#include <modm/platform/gpio/unused.hpp>
Classes | |
| struct | BitBang |
| struct | Bkin |
| struct | Cec |
| struct | Ch1 |
| struct | Ch1n |
| struct | Ch2 |
| struct | Ch2n |
| struct | Ch3 |
| struct | Ch3n |
| struct | Ch4 |
| struct | Ck |
| struct | Crssync |
| struct | Cts |
| struct | De |
| struct | Dm |
| struct | Dp |
| struct | Etr |
| struct | G1io1 |
| struct | G1io2 |
| struct | G1io3 |
| struct | G1io4 |
| struct | G2io1 |
| struct | G2io2 |
| struct | G2io3 |
| struct | G2io4 |
| struct | G3io2 |
| struct | G3io3 |
| struct | G4io1 |
| struct | G4io2 |
| struct | G4io3 |
| struct | G4io4 |
| struct | G5io1 |
| struct | G5io2 |
| struct | G5io3 |
| struct | G5io4 |
| struct | In0 |
| struct | In1 |
| struct | In2 |
| struct | In3 |
| struct | In4 |
| struct | In5 |
| struct | In6 |
| struct | In7 |
| struct | In8 |
| struct | In9 |
| struct | Mck |
| struct | Mco |
| struct | Miso |
| struct | Mosi |
| struct | Noe |
| struct | Nss |
| struct | Osc32in |
| struct | Osc32out |
| struct | Oscin |
| struct | Oscout |
| struct | Out |
| struct | Outalarm |
| struct | Outcalib |
| struct | Rts |
| struct | Rx |
| struct | Sck |
| struct | Scl |
| struct | Sd |
| struct | Sda |
| struct | Smba |
| struct | Swclk |
| struct | Swdio |
| struct | Sync |
| struct | Tamp1 |
| struct | Tamp2 |
| struct | Ts |
| struct | Tx |
| struct | Wkup1 |
| struct | Wkup2 |
| struct | Wkup4 |
| struct | Wkup6 |
| struct | Ws |
Public Typedefs | |
| using | Output = GpioUnused |
| using | Input = GpioUnused |
| using | IO = GpioUnused |
| using | Type = GpioUnused |
| using | Data = detail::DataUnused |
Public Types | |
| enum | InputType { InputType::Floating = 0x0, InputType::PullUp = 0x1, InputType::PullDown = 0x2 } |
| enum | OutputSpeed { Low = 0, Medium = 0x1, High = 0x3, MHz2 = Low, MHz10 = Medium, MHz50 = High } |
| enum | OutputType { OutputType::PushPull = 0x0, OutputType::OpenDrain = 0x1 } |
| enum | Port { A = 0, B = 1, C = 2, F = 5 } |
| The Port a Gpio Pin is connected to. | |
| enum | Direction { In = 0, Out = 1, InOut = 2, Special = 3 } |
| Declares the direction of a GPIO. | |
| enum | Direction { In = 0, Out = 1, InOut = 2, Special = 3 } |
| Declares the direction of a GPIO. | |
Static Public Member Functions | |
| static void | setOutput () |
| static void | setOutput (bool) |
| static void | setOutput (OutputType, OutputSpeed=OutputSpeed::MHz50) |
| static void | configure (OutputType, OutputSpeed=OutputSpeed::MHz50) |
| static void | set () |
| static void | set (bool) |
| static void | reset () |
| static bool | isSet () |
| static void | toggle () |
| static void | setInput () |
| static void | setInput (InputType) |
| static void | configure (InputType) |
| static bool | read () |
| static Direction | getDirection () |
| static void | lock () |
| static void | disconnect () |
| static bool | isSet () |
| static void | reset () |
| set output to low level | |
| static void | set () |
| set output to high level | |
| static void | set (bool value) |
| set output to high or low level | |
| static void | setOutput () |
| configure pin as output | |
| static void | setOutput (bool value) |
| configure pin as output and set high or low | |
| static void | toggle () |
| toggle output level | |
Static Public Attributes | |
| static constexpr bool | isInverted = false |
| static constexpr Port | port = Port(-1) |
| static constexpr uint8_t | pin = uint8_t(-1) |
| static constexpr uint16_t | mask = 0 |
| static constexpr bool | High = true |
| static constexpr bool | High = true |
| static constexpr bool | Low = false |
| static constexpr bool | Low = false |
| static constexpr Direction | direction = Direction::InOut |
| Declares the Pin direction. | |
| static constexpr Direction | direction = Direction::Out |
| Declares the Pin direction. | |
Static Protected Member Functions | |
| static void | setAlternateFunction (uint8_t) |
| static void | setAlternateFunction () |
| static void | setAnalogInput () |
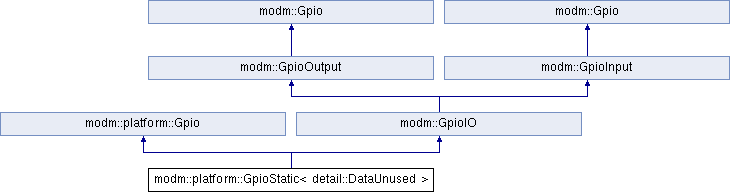
Dummy implementation of an I/O pin.
This class can be used when a pin is not required. All functions are dummy functions which do nothing. read() will always return false.
For example when creating a software SPI with the modm::SoftwareSimpleSpi class and the return channel (MISO - Master In Slave Out) is not needed, a good way is to use this class as a parameter when defining the SPI class.
Example:
|
inheritedstrong |
|
inheritedstrong |
|
inheritedstatic |
Returns the set logical output state of the pin. This may be different from the physical state!
|
inheritedstaticconstexpr |
These constants refer to the logical state of the GPIO. The physical state is determined by the configuration and external connection.
|
inheritedstaticconstexpr |
These constants refer to the logical state of the GPIO. The physical state is determined by the configuration and external connection.
 1.4.2
1.4.2 
