#include <modm/platform/uart/uart_2.hpp>
|
| enum | Parity : uint32_t { Even = 0,
Odd = 1,
Disabled = 2
} |
| |
| enum | RxPinout : uint8_t { RxPad0 = 0,
RxPad1 = 1,
RxPad2 = 2,
RxPad3 = 3
} |
| |
| enum | TxPinout : uint8_t { TxPad0_XckPad1 = 0,
TxPad2_XckPad3 = 1,
TxPad0_RtsTePad2_CtsPad3 = 2
} |
| |
|
|
template<class... Pins> |
| static void | connect () |
| |
|
template<class SystemClock , baudrate_t baudrate, percent_t tolerance = pct(1)> |
| static void | initialize (Parity parity=Parity::Disabled) |
| |
|
static void | writeBlocking (uint8_t data) |
| |
|
static void | writeBlocking (const uint8_t *data, std::size_t length) |
| |
|
static void | flushWriteBuffer () |
| |
|
static bool | write (uint8_t data) |
| |
|
static std::size_t | write (const uint8_t *data, std::size_t length) |
| |
|
static bool | isWriteFinished () |
| |
|
static std::size_t | discardTransmitBuffer () |
| |
|
static bool | read (uint8_t &data) |
| |
|
static std::size_t | read (uint8_t *buffer, std::size_t length) |
| |
|
static std::size_t | discardReceiveBuffer () |
| |
| static void | acknowledgeInterruptFlag () |
| |
| template<uint64_t available, uint64_t requested, percent_t tolerance> |
| static void | assertBaudrateInTolerance () |
| |
|
template<double available, double requested, percent_t tolerance> |
| static void | assertDurationInTolerance () |
| |
|
static void | clearError () |
| | Reset the sticky error indication.
|
| |
|
static void | configurePurpose () |
| | configures a peripheral for a specific purpose
|
| |
|
static bool | getInterruptFlag () |
| | Read an interrupt flag.
|
| |
|
static void | getParameter () |
| | returns a parameter
|
| |
| static bool | hasError () |
| |
| template<class SystemClock , baudrate_t baudrate, percent_t tolerance = 10_pct> |
| static void | initialize () |
| |
| static std::size_t | receiveBufferSize () |
| |
|
static void | setParameter () |
| | sets a parameter
|
| |
| static std::size_t | transmitBufferSize () |
| |
|
|
static constexpr size_t | RxBufferSize = 16 |
| | Size of the receive buffer.
|
| |
|
static constexpr size_t | TxBufferSize = 16 |
| | Size of the transmit buffer.
|
| |
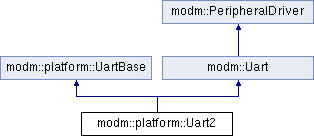
Universal asynchronous receiver transmitter (UART2)
- Author
- Erik Henriksson
| static void modm::PeripheralDriver::acknowledgeInterruptFlag |
( |
| ) |
|
|
inheritedstatic |
Acknowledge an interrupt flag.
We use acknowledge here, since it describes the intention rather than the actual implementation.
template<uint64_t available, uint64_t requested, percent_t tolerance>
| static void modm::PeripheralDriver::assertBaudrateInTolerance |
( |
| ) |
|
|
inheritedinlinestatic |
Since baudrates are usually generated by prescaling a system clock, only several distinct values can be generated. This method checks if the user requested baudrate is within error tolerance of the system achievable baudrate.
| static bool modm::Uart::hasError |
( |
| ) |
|
|
inheritedstatic |
- Returns
true if an error occured during any write or read
template<class SystemClock , baudrate_t baudrate, percent_t tolerance = 10_pct>
| static void modm::Uart::initialize |
( |
| ) |
|
|
inheritedstatic |
Initializes the hardware and sets the baudrate.
- Template Parameters
-
| SystemClock | the currently active system clock |
| baudrate | desired baud rate in Hz |
| tolerance | the allowed absolute tolerance for the resulting baudrate |
| static std::size_t modm::Uart::receiveBufferSize |
( |
| ) |
|
|
inheritedstatic |
- Returns
- the size of the receive FIFO queue.
| static std::size_t modm::Uart::transmitBufferSize |
( |
| ) |
|
|
inheritedstatic |
- Returns
- the size of the transmit FIFO queue.
The documentation for this class was generated from the following files:
 1.4.2
1.4.2 
