|
|
template<class... Signals> |
| static void | connect () |
| |
|
template<class SystemClock , baudrate_t baudrate, percent_t tolerance = pct(5)> |
| static void | initialize () |
| |
|
static void | setDataMode (DataMode mode) |
| |
|
static void | setDataOrder (DataOrder order) |
| |
|
static void | setDataSize (DataSize size) |
| |
|
static uint8_t | acquire (void *ctx, ConfigurationHandler handler=nullptr) |
| |
|
static uint8_t | release (void *ctx) |
| |
|
static uint8_t | transferBlocking (uint8_t data) |
| |
|
static void | transferBlocking (const uint8_t *tx, uint8_t *rx, std::size_t length) |
| |
|
static modm::ResumableResult< uint8_t > | transfer (uint8_t data) |
| |
|
static modm::ResumableResult< void > | transfer (const uint8_t *tx, uint8_t *rx, std::size_t length) |
| |
| static void | acknowledgeInterruptFlag () |
| |
| template<baudrate_t available, baudrate_t requested, percent_t tolerance> |
| static void | assertBaudrateInTolerance () |
| |
|
static void | configurePurpose () |
| | configures a peripheral for a specific purpose
|
| |
|
static bool | getInterruptFlag () |
| | Read an interrupt flag.
|
| |
|
static void | getParameter () |
| | returns a parameter
|
| |
|
static void | initialize () |
| | initializes the peripheral, must be called before use.
|
| |
|
static void | setDataMode (DataMode mode) |
| | Sets a new data mode.
|
| |
|
static void | setDataOrder (DataOrder order) |
| | Sets a new data order.
|
| |
|
static void | setParameter () |
| | sets a parameter
|
| |
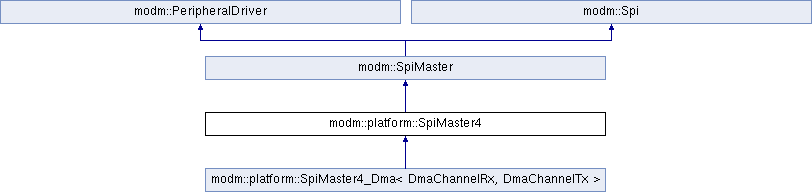
Serial peripheral interface (SPI4).
Simple unbuffered implementation.
- Author
- Niklas Hauser
 1.4.2
1.4.2 
