|
| template<class SystemClock , baudrate_t baudrate, percent_t tolerance = pct(5)> |
| static void | initialize () |
| |
|
static uint8_t | transferBlocking (uint8_t data) |
| |
|
static void | transferBlocking (const uint8_t *tx, uint8_t *rx, std::size_t length) |
| |
|
static modm::ResumableResult< uint8_t > | transfer (uint8_t data) |
| |
|
static modm::ResumableResult< void > | transfer (const uint8_t *tx, uint8_t *rx, std::size_t length) |
| |
| static void | acknowledgeInterruptFlag () |
| |
|
static uint8_t | acquire (void *ctx, ConfigurationHandler handler=nullptr) |
| |
| template<baudrate_t available, baudrate_t requested, percent_t tolerance> |
| static void | assertBaudrateInTolerance () |
| |
|
static void | configurePurpose () |
| | configures a peripheral for a specific purpose
|
| |
|
template<class... Signals> |
| static void | connect () |
| |
|
static bool | getInterruptFlag () |
| | Read an interrupt flag.
|
| |
|
static void | getParameter () |
| | returns a parameter
|
| |
|
static void | initialize () |
| | initializes the peripheral, must be called before use.
|
| |
|
static uint8_t | release (void *ctx) |
| |
|
static void | setDataMode (DataMode mode) |
| |
|
static void | setDataMode (DataMode mode) |
| | Sets a new data mode.
|
| |
|
static void | setDataOrder (DataOrder order) |
| |
|
static void | setDataOrder (DataOrder order) |
| | Sets a new data order.
|
| |
|
static void | setDataSize (DataSize size) |
| |
|
static void | setParameter () |
| | sets a parameter
|
| |
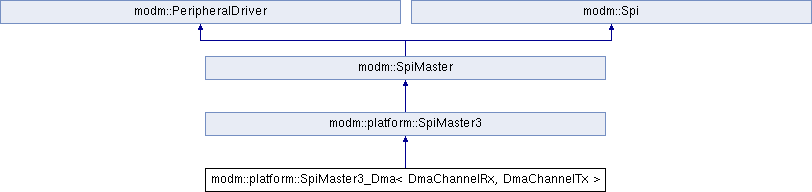
template<class DmaChannelRx, class DmaChannelTx>
class modm::platform::SpiMaster3_Dma< DmaChannelRx, DmaChannelTx >
Serial peripheral interface (SPI3) with DMA support.
This class uses the DMA controller for sending and receiving data, which greatly reduces the CPU load. Beside passing the DMA channels as template parameters the class can be used in the same way like the SpiMaster3.
- Template Parameters
-
| DmaChannelRX | DMA channel for receiving |
| DmaChannelTX | DMA channel for sending |
- Author
- Mike Wolfram
 1.4.2
1.4.2 
